Nathan's Brainstorming
Brain Storm
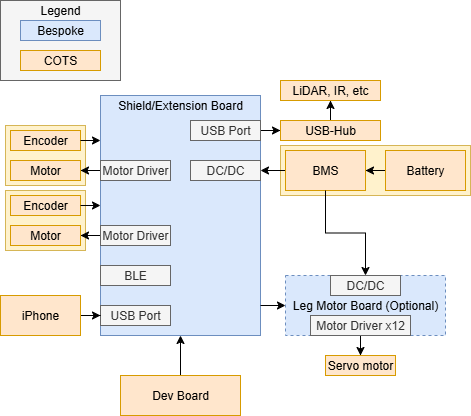
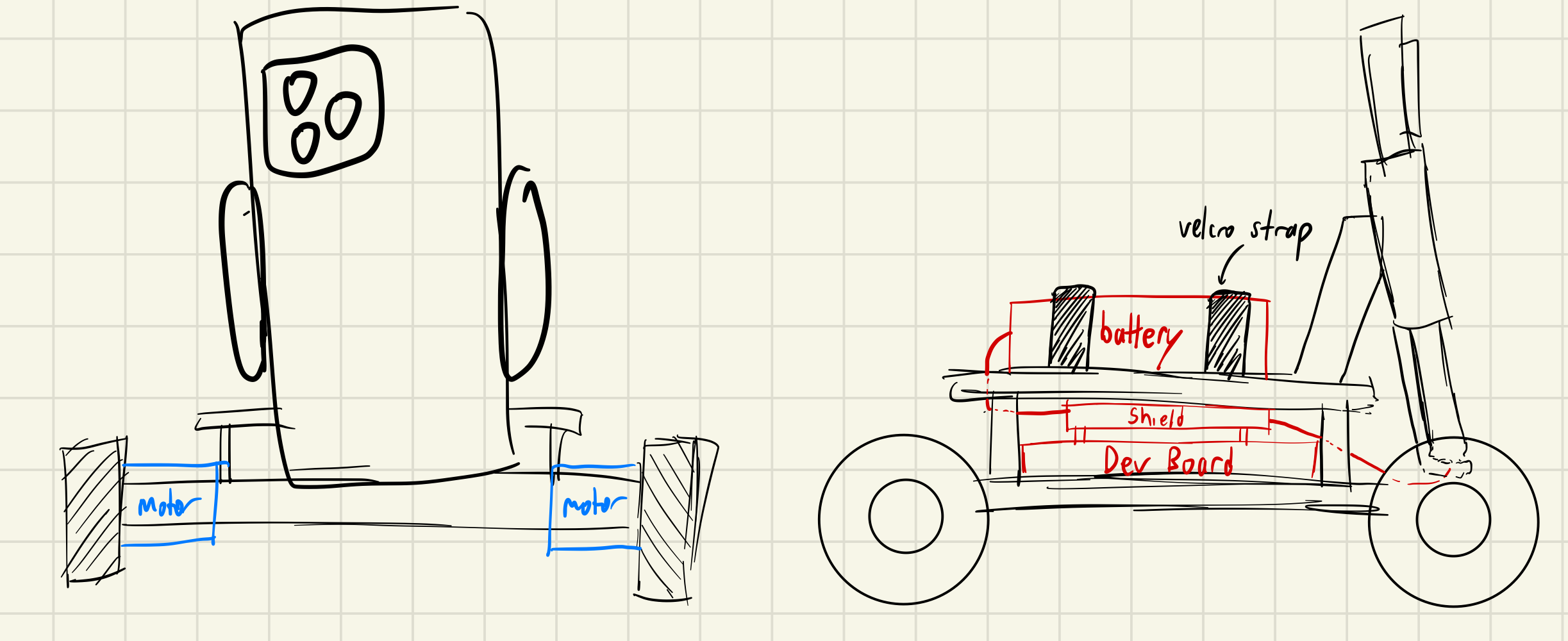
Wheeled Configuration:
| Feature | Geared DC Motor | BLDC Motor |
|---|---|---|
| Pros | High Torque Affordable Easy to control | Long lifespan High RPM Highly efficient |
| Cons | Short lifespan Low RPM Low Efficiency | Expensive Requires ESC |
- I believe we should use a geared DC motor for the wheeled configuration because it meets system specs at the most affordable price.
- Use an external encoder for closed loop feedback.
- Input: Shaft position
- Output: PWM duty cycle
Legged Configuration:
- Fundamentally different motor architecture
- A quadruped requires more motors, and each requires higher rated torque than wheeled configuration.
- Makes more sense to use servos since they’re affordable, have built in angle feedback, and are easier to integrate
- I propose design that the wheeled configuration be the base version, with an additional legged motor controller board that can be plugged in
- The legged motor controller board will have the motor drivers necessary to the servos.