Basic mapping and localization
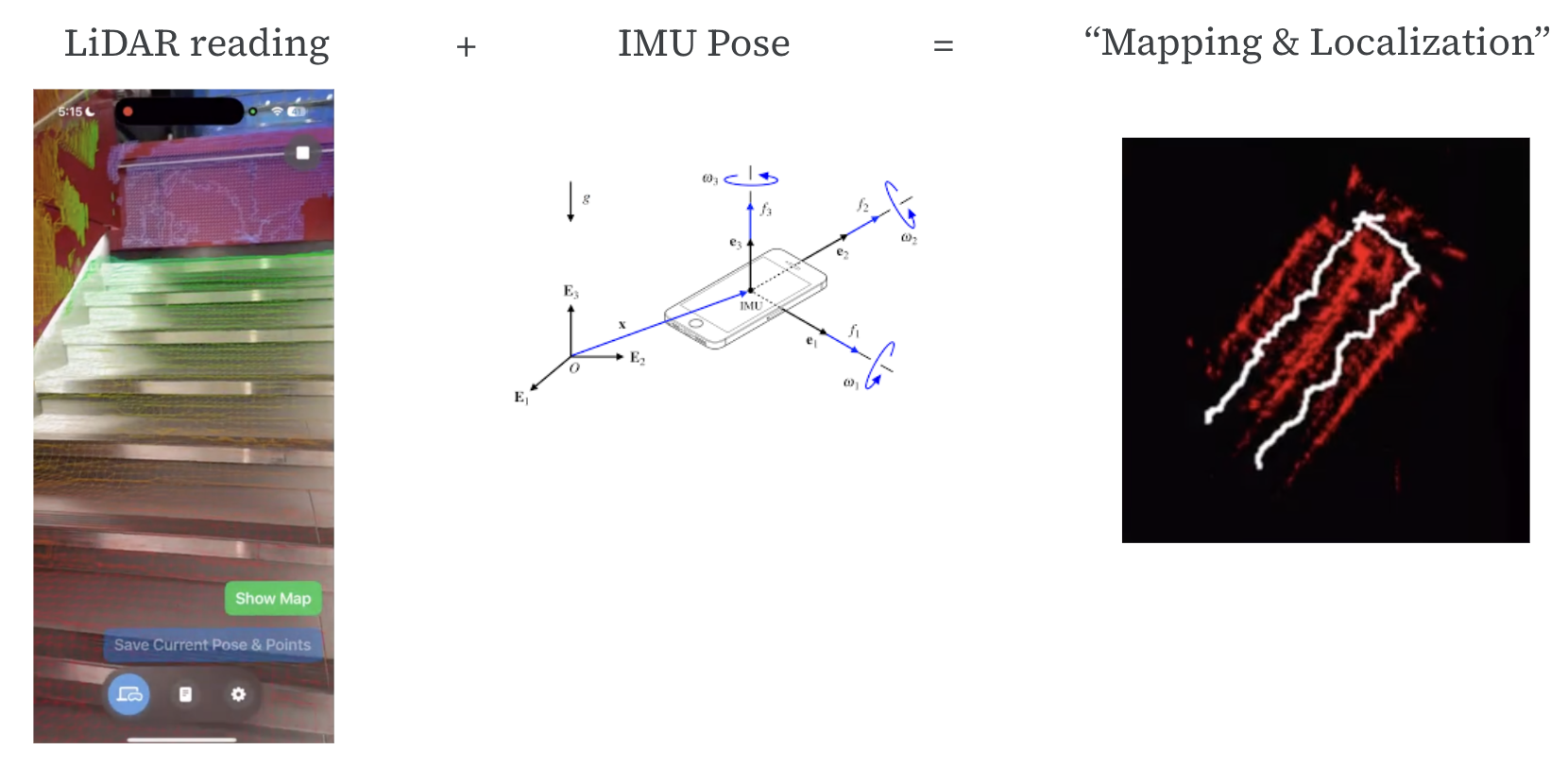
To validate our software architecture, Kai built a basic “mapping and localization” demonstration.
To recap, we are aiming to use minimize the need for users to do development in Swift/XCode and allow them to write code in C++, which is then compiled to WASM to run on the phone. To this end, we put together a basic demo with WASMKit.
Mapping and localization idea
In this demo, the sensor reading for LiDAR and IMU pose is done from Swift. Point cloud and pose information is then written to map form using a C++ backend (compiled to WASM).