Updating our robot's ICR
While the updated wheels with treads (as shown in our previous mechanical work log) was able to help the robot move easier, we’ve identified another problem. Right now, the old design places the wheels towards the back of the robot, however, this means that the robot has issues spinning in place. Instead, it’s turning radius is larger than the radius of the robot.
While solveable in software, it would be simplier if the ICR of the robot aligned with the center of the robot. Furthermore, moving the wheels to be along the center axis of the robot would also allow the robot to drive easier.
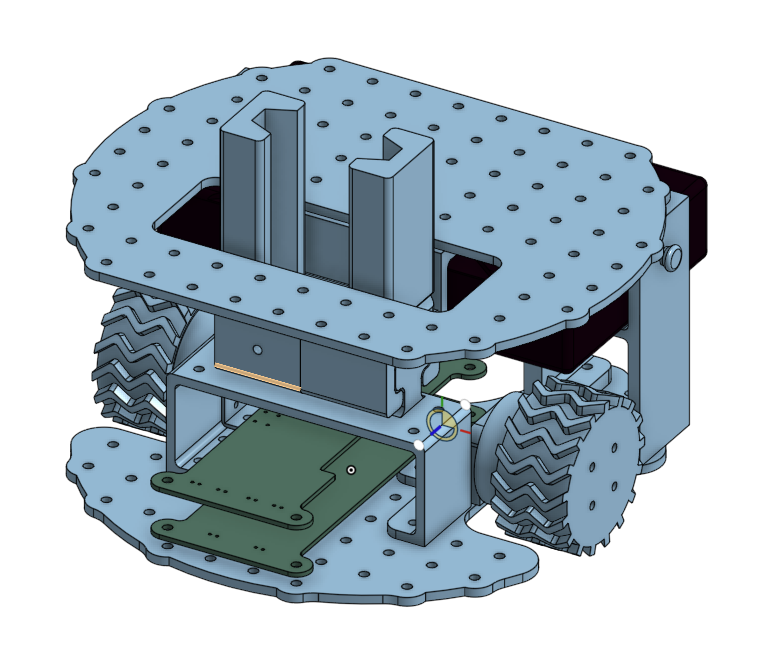
Therefore, today, we updated our robot’s mechanical design significantly to reflect this change. Here is the first draft of the new CAD. We will continue to improve it as we print parts and test it out.